Difference between revisions of "Meshland"
(Link updates) |
m |
||
| Line 33: | Line 33: | ||
The performance for engines 1 and 2 is unique. | The performance for engines 1 and 2 is unique. | ||
| − | Generic vessel support allows to use | + | Generic vessel support allows to use unmodified vessels when landing on the landscape (With small limitations). |
For advanced features there is Collision SDK. | For advanced features there is Collision SDK. | ||
| − | Also, a "3D surface" [[MFD]] is included, which is a scratch of | + | Also, a "3D surface" [[MFD]] is included, which is a scratch of [[Surface MFD]] with some Visosad controls. |
==Bugs/limitations== | ==Bugs/limitations== | ||
| Line 47: | Line 47: | ||
==Links== | ==Links== | ||
| − | Current version: 1.9.2.1 | + | * [http://www.orbithangar.com/searchid.php?ID=1396 Current version: 1.9.2.1 on Orbithangar] |
| + | * [http://cmc107.big-bossa.com/files/etc/ml-270206.zip Beta version (vessel-vessel collisions): ml-270206] | ||
| + | * [http://www.orbitersim.com/Forum/default.aspx?g=posts&t=4163 Beta thread at Orbiter forum] | ||
| + | * [http://artlav.land.ru Author main site (development status, etc)] | ||
| − | + | [[Category:Add-ons]] | |
| − | + | [[Category:Miscellaneous add-ons]] | |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | [[Category: | ||
Revision as of 18:24, 7 March 2007
|
Project home: [N/A] |
Description
MeshLand is an Orbiter plugin which offers a vessel-terrain and vessel-vessel collision detection and handling for Orbiter.
MeshLand interfaces with Visosad, which is a rigid body physics simulator.
Key Features
Calculates collisions between vessels, based on real physics (beta only).
Allows to land on terrain meshes, planetary meshes (asteroids) and multi-level structures.
http://www.rumaxclub.ru/etc/evaws.jpg
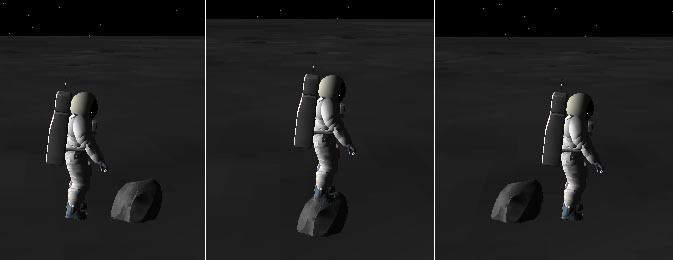{kind=link}
Jumping over rock - Image by Tschachim
http://www.rumaxclub.ru/etc/lrvfm.jpg
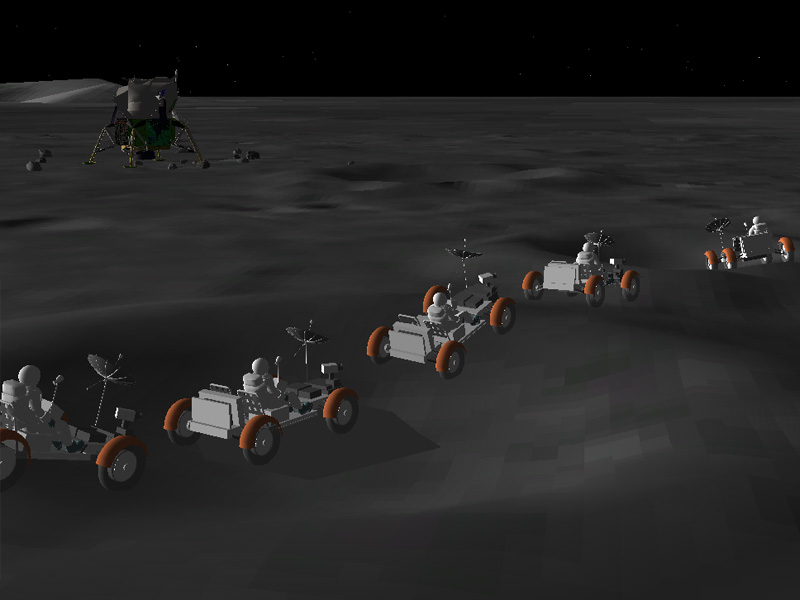{kind=link}
Driving over Fra Mauro - Image by Redburne
http://www.orbithangar.com/addonpics/ml.jpg
{kind=link}
Landed at Vallis Dao rocks
Collision detection is largely independant from the sizes and amounts of landscape details. The performance for engines 1 and 2 is unique.
Generic vessel support allows to use unmodified vessels when landing on the landscape (With small limitations).
For advanced features there is Collision SDK.
Also, a "3D surface" MFD is included, which is a scratch of Surface MFD with some Visosad controls.
Bugs/limitations
When the vessel is in generic mode (all of them, unless modifyed) landing gears is assumed to be in the same state, that in the beginning of the simulation, no matter what is their current state.
Bases that uses SPHEREMAPPED feature is not supported.
Configuration and documentation is known to be confusing.